"You have to know what you are measuring before you can measure it"
What is wrong with this plot?
1. Mass dimension [M], SI unit (kg)
2. Time dimension [T], SI unit (s)
in Western societies
the year is 2002 AD
in Islamic societies
the year is 1421 AH
computesr measure
time from 1 Jan 1970
3. Position dimension [L], SI
unit (m)
In mechanics, these three properties are considered to be the basic units, all other mechanical variables can be expressed in terms of them.
4. Velocity
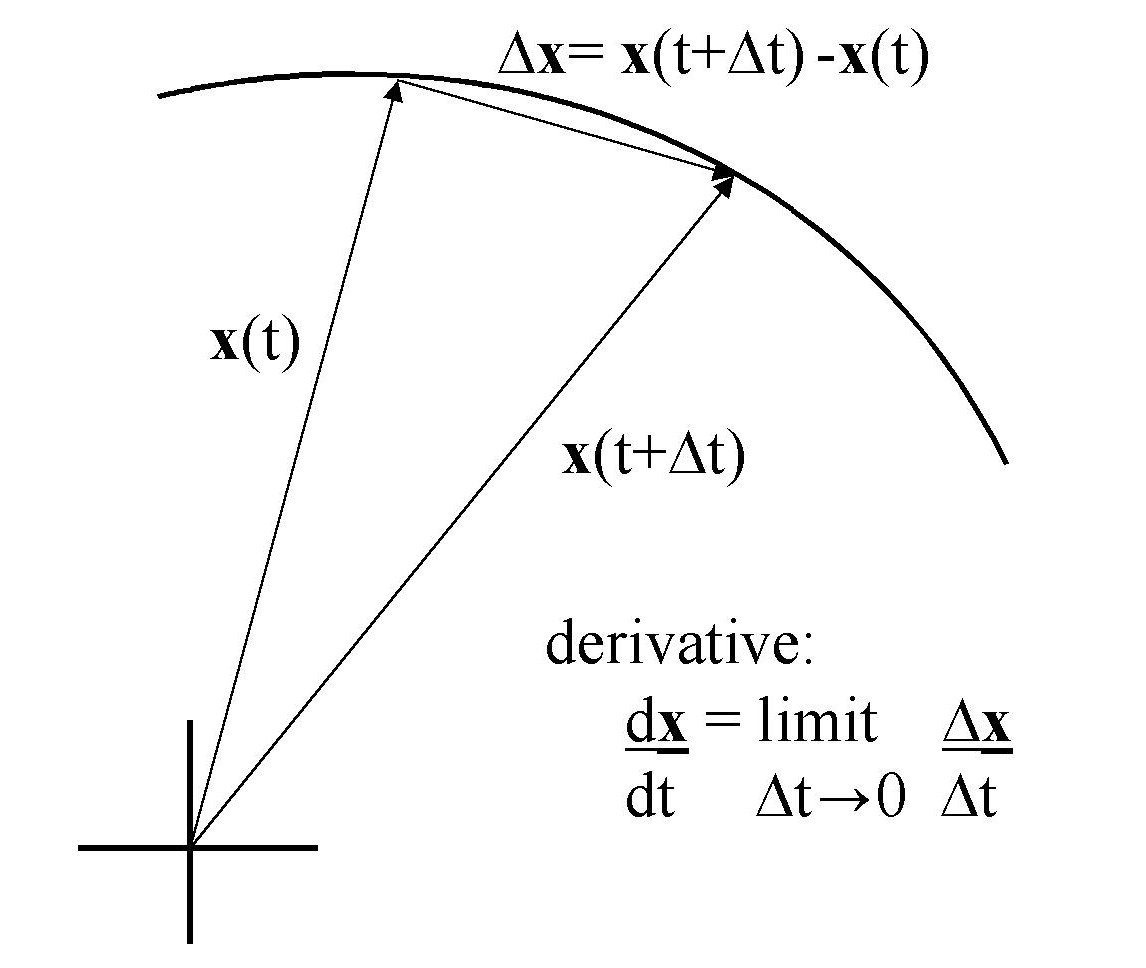
If position is a function of time, X(t), we can define the rate of change of position by considering the ratio of the change of position to the change of time,
Note that there is an intimate connection between mechanics and calculus which is not surprising because calculus was invented by Newton and Liebnitz to assist their study of mechanics. Until the start of the last century, nearly all advances in applied mathematics were motivated by problems in mechanics.
5. Acceleration
Velocity is a function of time, V(t), and so we can similarly define the
rate of change of velocity
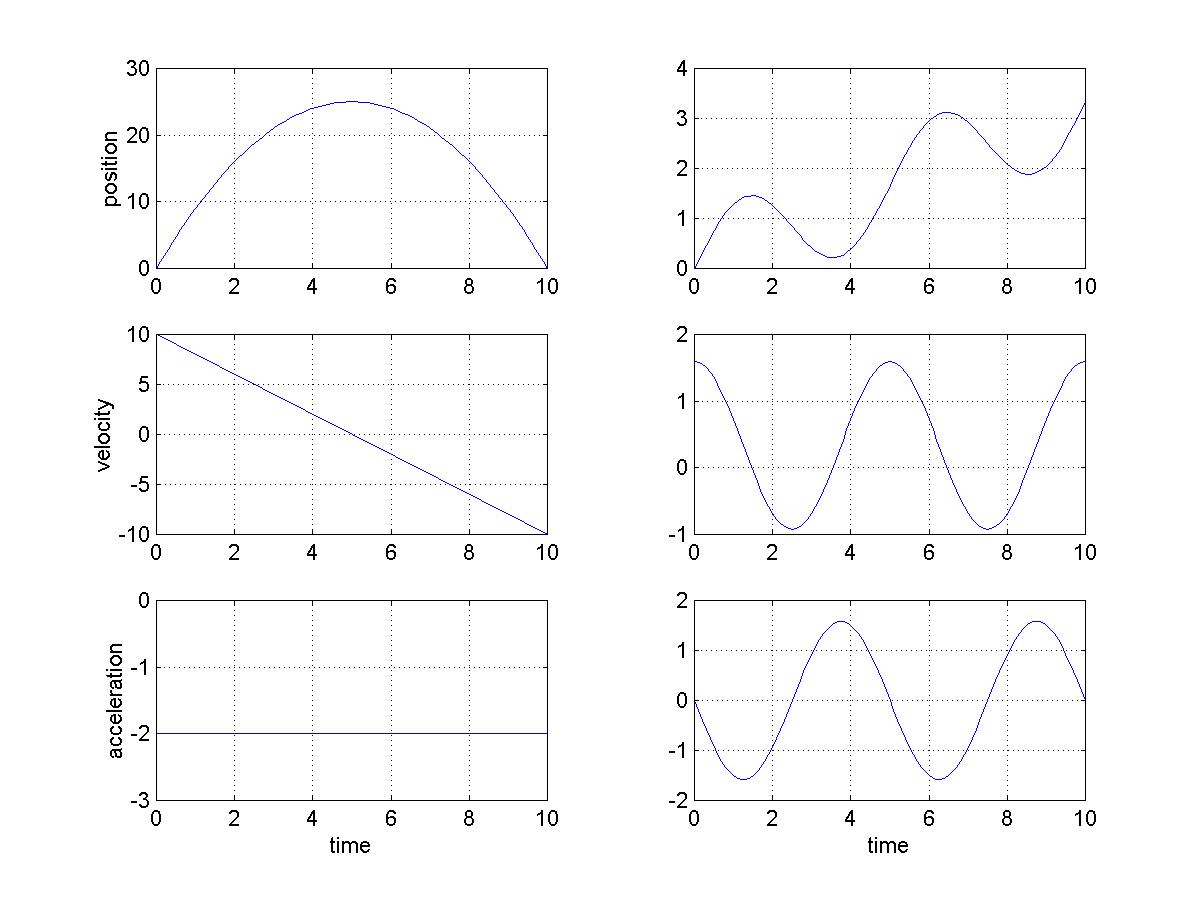
The example to the left shows what happens when an object is tossed into the air when the force of gravity is constant. Position is the height of the object which starts at ground level (zero height), reaches a peak height and then falls back to ground. Initially the velocity is positive, the object is initially moving upward. The velocity decreases linearly until zero velocity is attained at the time that the object reaches its maximum height. Then the velocity gets more and more negative until it strikes the ground with speed (magnitude of velocity) as it left at time zero.
The example to the right follows a more complicated path. Note that zeros in velocity correspond to the local maxima and minima in position. Similarly, maxima and minima in the velocity correspond to points of zero acceleration which correspond to points of inflection in the position. Velocity is the slope of position. Acceleration is the slope of the velocity.
6. Force
In addition to moving around in space, bodies interact with each other. These
mechanical interactions are called forces. There are many types of forces;
muscular forces (pulling and pushing), gravitational, hydrodynamic, magnetic...
One of Newton's great contributions to human understanding was his concept
of a general force, i.e.that all of these different forces
were different manifestations of the same thing.
F = d (MV)
dt
where F is the net force (the sum of all of the forces acting on a body) and MV is known as the momentum.
In the special case when the mass of the body is constant in time (the usual case in biomechanics)
F = d (MV) = M dV
= MA
dt
dt
Newton's second law is the basis of virtually all of mechanics. Since Einstein's theory of relativity, we know that this law breaks down when velocities approach the speed of light. Apart from this, Newton's second law has been very well tested and must be considered as much of a 'law' as there is in science. (Remember that scientific hypotheses can only be disproved, not proved.)
7. Work and Energy
Because it is more difficult to work with vectors, it is convenient to define scalars that characterise the dynamics of a body. Work and energy are two very useful scalar properties.
Work: Work is defined as the integral of the scalar product of force and distance moved W = Integral(F · dx)
The dimensions of work are [M][L]2[T]-2; in SI units (kg m2/s2) defined as (W).
Energy: There are several types of energy. Two examples are:
- Kinetic energy:
KE = ½ MV2
- Potential energy due to gravity:
PE = Mgh
where g is the acceleration due to gravity and h is the height.
The dimensions of energy are the same as work, [M][L]2[T]-2
When there is no dissipation, the change in total energy in a system is equal to the work done on it. If no external work is done on the system, the total energy is constant.
Energy is also important when we consider interactions which are not simply mechanical. In the body, for example, we generally have to consider chemical energy (metabolism) and thermal energy (heat).
Fluid Mechanics